|
Trax3 3.1.0
trax track library
|
|
Trax3 3.1.0
trax track library
|
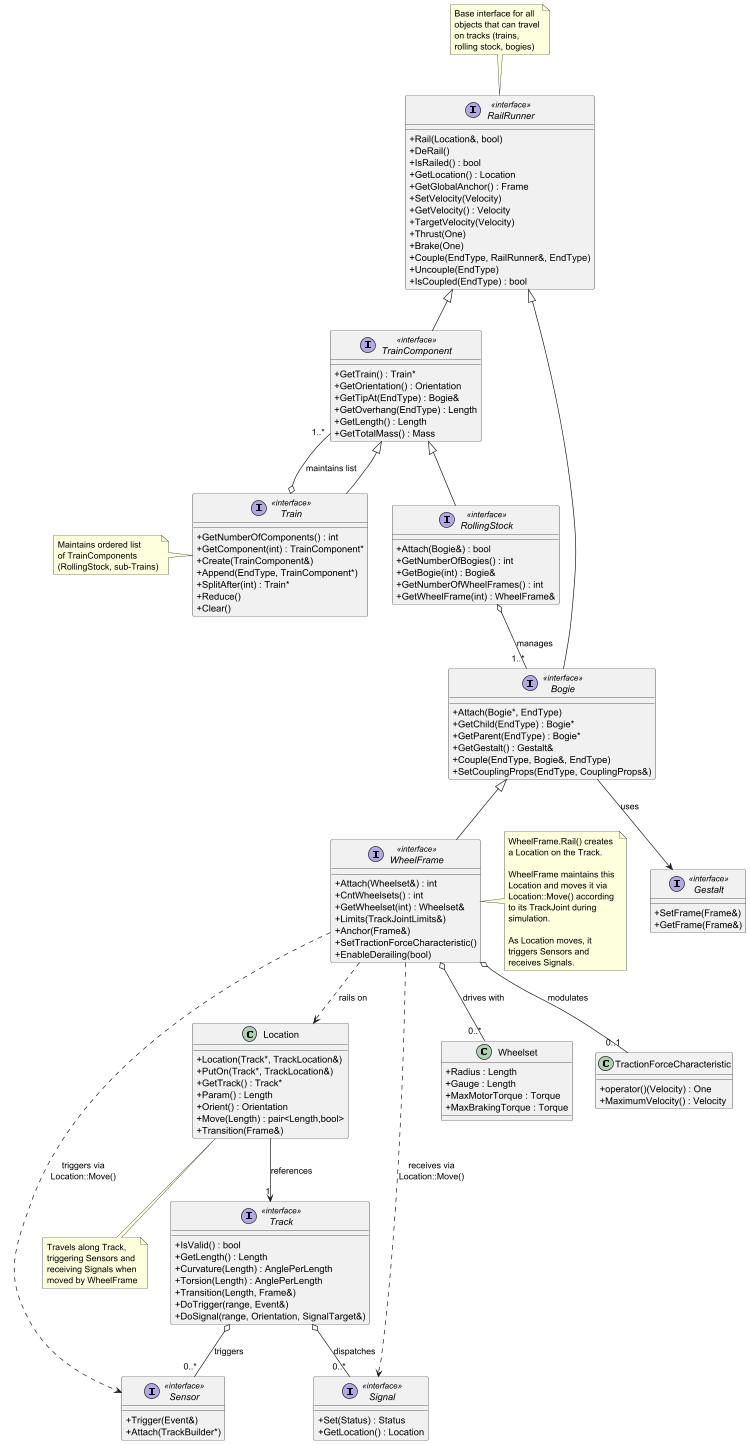
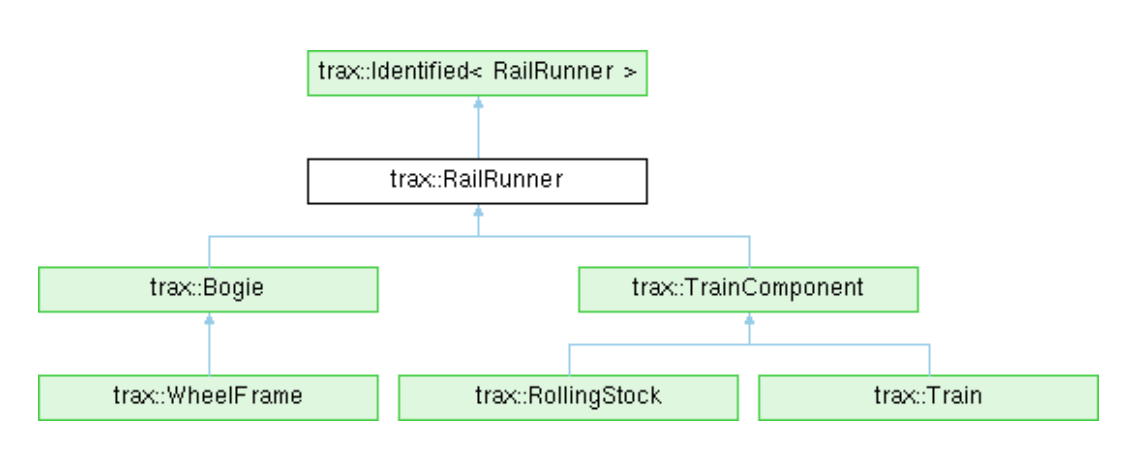
A rail runner can be railed on a track. The RailRunner interface provides all means for railing/derailing, coupling and for steering something on a track system like thrust and brake.
The anchor is the position of the TrackJoint in a WheelFrame . It will define the Location of the RailRunner on a Track. For a RollingStock, which is built up from several WheelFrames and Bogies, the anchor will be the northmost WheelFrame's anchor; for a Train it will be the northmost RollingStock's anchor.
A WheelFrame can hold Wheelsets that determine the driving and braking torques that can get applied in a simulation.
A Bogie can be connected to up to two parent Bogies. It itself can hold up to two child Bogies. Since a WheelFrame is a Bogie with a TrackJoint, a typical configuration will be e.g. a Bogie with two child WheelFrames. Also a Jakobs bogie arrangement can be realised by connecting two Bogies to a common child WheelFrame.
In principle a Bogie/WheelFrame assembly can be railed on a track and used in the simulation. However it is recommended to wrap such an arrangement in a RollingStock . A RollingStock manages the Bogie/WheelFrame arrangement if it comes to railing or steering. It also is the basic building block for Trains.
Bogies provide couplings at their tip ends that can form a stable connection to other Bogies. Those couplings relay to RollingStock and Trains, that therefore can get coupled, too.
A Train is a RailRunner that maintains an ordered list of TrainComponents. RollingStock and Train itself qualify as TrainComponents. That way a train might be composed from other trains.
Splitting a train at a certain position means creating two new sub-trains, which from that moment on make up the original train. This alone would not decouple the two new trains; only the parent train now consists of the two new trains as components. To decouple them, the original train additionally has to be Clear() ed. This will decouple all components from each other and remove them from the train.
The opposite process to splitting is to Reduce() the sub-trains again, so their direct members become direct members of their parent train. The reduced - and now empty - trains are removed from their parent and have become invalid.
Despite this handling pattern it might be necessary to uncouple two TrainComponents. This will keep the parent train intact, only that it shows up as being IsUnCoupledInternally() . This also might happen if a coupling breaks during simulation. In this case Separate() can be used to remove all components south of the broken coupling from the train and return them as a new train.
Rolling stock and trains can get coupled without having a parent train, albeit it is easy to Create() one from already coupled components. The use of trains is optional, but recommended for easier handling of railing and steering.
Automatic couplings are realised in the trax library. Those couplings can be switched to active, passive or beeing coupled. An active coupling would couple another active one, as soon as their spheres of influence intersect. If one of the two couplings is passive, nothing would happen. To make this work, a Fleet is needed that holds the trains to be considered for automatic coupling.
Moving a RailRunner might look a little odd, since the velocity of a WheelFrame is a constraint for the physics engine: first the Wheelsets have to specify the maximum available braking and driving forces as the capabilities of the machine. Of these limits a RailRunner can specify what fraction to actually apply at a given moment by the Thrust() and the Brake() methods. Secondly there is a target velocity (vTarget) to be set for a RailRunner by the TargetVelocity() method, so the physics engine knows what velocity to head for. It is clear that these limits might not be sufficient to actually reach vTarget. If they would, vTarget would be reached immediately and be kept that way. In practice the braking and driving forces will compete with other forces like gravity or mass inertia and friction, as they in reality do.
To simulate the behaviour of real locomotive controls, as handled by an engineer, it is necessary to map those controls to the braking, thrust and vTarget values properly. To that end the library provides a TractionForceCharacteristic that models the motor/gear arrangement of a real locomotive.